变换包括平移、旋转、缩放等,单纯地用数学表达式可以实现变换功能,但遇到复杂的变换,数学表达是就有些吃力了,这时候变换矩阵就派上了用场;下面用这两种方式分析一下变换的基本原理;
一、数学表达式
查看平移、旋转、缩放的demo请点击这里;
1、平移
顶点着色器代码
attribute vec4 a_Position;
uniform vec4 u_Transition;
void main(){
gl_Position = a_Position + u_Transition;
gl_PointSize = 10.0;
}上面的代码表示以 a_Position 坐标为基准,移动 u_Transition 这个向量,a_Position 和 u_Transition 都是 vec4 类型的,可以直接相加;
vec4 类型中,最后一个分量 w 是齐次坐标,平移情况下,两者相加只能为1,否则就把图形放大或缩小了;
2、旋转
描述旋转有3个属性:旋转轴、旋转方向、旋转角度;
逆时针旋转也可以称作正旋转,可以用右手法则来确定,右手握拳,大拇指伸直并使其指向旋转轴的方向,其余手指的方向就是逆时针;
将二维坐标系中的一个点(x, y)沿原点旋转角度β,则旋转后的坐标(x1, y1)为:
x1 = x*cosβ – y*sinβ
y1 = x*sinβ + y*cosβ
这两个公式直接作为结论记住就可以了,推导的话,在坐标系中实际操作一下,画两个直角三角形就可以;
由上面的公式可以编写顶点着色器代码:
attribute vec4 a_Position;
uniform float u_SinB, u_CosB;
void main(){
gl_Position.x = a_Position.x * u_CosB - a_Position.y * u_SinB;
gl_Position.y = a_Position.x * u_SinB + a_Position.y * u_CosB;
gl_Position.z = a_Position.z;
gl_Position.w = a_Position.w;
gl_PointSize = 10.0;
}公式中的 sinβ、cosβ 在js中计算好了传进来
var angle = 80;
var u_CosB = gl.getUniformLocation(gl.program, 'u_CosB');
var u_SinB = gl.getUniformLocation(gl.program, 'u_SinB');
var rad = 2 * Math.PI * angle / 360; // 角度转弧度
gl.uniform1f(u_SinB, Math.sin(rad));
gl.uniform1f(u_CosB, Math.cos(rad));js 中的 Math.cos()、Math.sin() 参数为弧度,角度转弧度:一周 2π=360°,按比例算一下就可以了;
上面是两个参数分开,也可以直接把两个值一块儿传过去,比如用 uniform2f 方法,传两个值 gl.uniform1f(u_SinCosB, Math.sin(rad), Math.cos(rad));顶点着色器中,使用 u_SinCosB.x、u_SinCosB.y 来获取;
* 3、缩放
平移中提到了,可以用齐次坐标来控制缩放;
二、变换矩阵
1、矩阵和矢量相乘
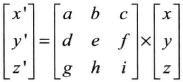
上面的矩阵 [a…i] 乘 向量(x, y, z) 的公式为:
x’ = ax + by + cz;
y’ = dx + ey + fz;
z’ = gx + hy + iz;
不支持交换律,即 A×B 不等价于 B×A;
2、平移、旋转和缩放矩阵
原理
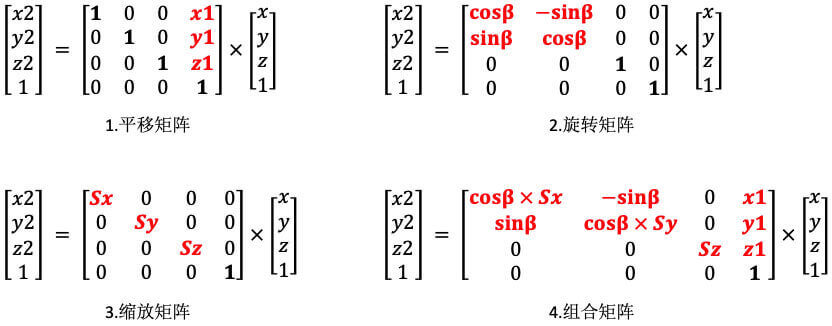
上面的矩阵中,(x, y, z, 1) 表示点的初始坐标;(x2, y2, z2, 1) 表示转换之后的新坐标;(x1, y1, z1) 表示平移的矢量;cosβ、sinβ表示β这个角度的余弦、正弦值;(Sx, Sy, Sz) 表示 x、y、z 三个方向的缩放倍数;
原始的4×4矩阵是一个主对角线值均为1的对角矩阵,其他操作都是在这个基础上替换值;
数学中的矩阵是按行存储的,WebGL/OpenGL 中的矩阵是按列存储的,专有名词为按行主序(row major order)和按列主序(column major order);
具体代码
顶点着色器代码如下,直接用矩阵和位置向量相乘
attribute vec4 a_Position;
uniform mat4 u_Matrix;
void main(){
gl_Position = u_Matrix * a_Position;
gl_PointSize = 1.0;
}js 中的相关操作代码如下:
// 设置矩阵
var trans = {x: 0, y: 0, z: 0, w: 1.0};
var scale = {x: 1.2, y: 2, z: 1};
var angle = 0;
var rad = 2 * Math.PI * angle / 360; // 角度转弧度
var sinB = Math.sin(rad), cosB = Math.cos(rad);
var matrix = new Float32Array([
cosB * scale.x, sinB, 0.0, 0.0,
-sinB, cosB * scale.y, 0.0, 0.0,
0.0, 0.0, scale.z, 0.0,
trans.x, trans.y, trans.z, trans.w,
]);
// 传递参数
gl.uniformMatrix4fv(u_Matrix, false, matrix);这段代码中,有一个需要注意的地方,trans 平移向量的最后一个分量为1.0,因为这里是相乘;在数学表达式方式中,这个分量是0,因为是执行相加操作;
gl.uniformMatrix4fv(u_Matrix, false, matrix)
该操作的含义:用 matrix 表示的 4×4 矩阵分配给 u_Matrix 这个 uniform 变量;
第二个参数表示是否转置矩阵,转置操作会交换行和列,但WebGL没有实现矩阵转置的方法,这里必须设置为false;
uniformMatrix4fv 中的 v 表示可以向着色器传输多个数据值;
如果第二个参数设置为true,或者第三个参数 matrix 的数组长度不是16,Chrome 中会报 Warning,而不是 Error;
源代码在这儿
三、高级变换和动画
1、复合变换
对原始坐标进行多个变换时,实际的矩阵操作是按照逆序进行的;
比如对一个三角形依次进行平移、旋转、缩放,具体的代码中,矩阵操作要先缩放,再旋转,最后在平移;推导过程如下:
平移后的坐标 = 平移矩阵 × 原始坐标;
旋转后的坐标 = 旋转矩阵 × 平移后的坐标
= 旋转矩阵 × ( 平移矩阵 × 原始坐标 )
缩放后的坐标 = 缩放矩阵 × 旋转后的坐标
= 缩放矩阵 × ( 旋转矩阵 × ( 平移矩阵 × 原始坐标 ) )
最后一个公式中,括号可以去掉,矩阵乘法不支持交换律,但支持结合律,把原始坐标摘出来,对应到顶点着色器中的代码“变换矩阵 × 原始坐标”,则整理后的公式:
变换后的坐标 = ( 缩放矩阵 × 旋转矩阵 × 平移矩阵 ) × 原始坐标
2、作者整理的矩阵操作库
作者整理了一个矩阵操作的库,源代码在 coun-matrix.js 中,还是有点用的;
* 官方examples在这儿,翻不了墙的可以在github这里找到,但都不是原作者创建的;
该库中有一个 Matrix4 类/函数,使用时先要 new 一个对象 var mat4 = new Matrix4(),然后就可以使用下面这些支持的方法或属性了:
- mat4.setIdentity():将当前实例初始化为单位矩阵(即上面提到的未经过变换对角线上值为1的原始对角矩阵);
- mat4.setTranslate(x, y, z):将当前实例的矩阵设置为平移矩阵;
- mat4.setRotate(angle, x, y, z):将当前实例的矩阵设置为旋转矩阵,(x, y, z) 为旋转轴;
- mat4.setScale(x, y, z):将当前实例的矩阵设置为缩放矩阵;
- mat4.translate(x, y, z):当前实例的矩阵乘以一个位移为(x, y, z)的平移矩阵,计算结果会覆盖当前实例的矩阵;
- mat4.rotate(angle, x, y, z):当前实例的矩阵乘以一个角度为angle,旋转轴为(x, y, z)的旋转矩阵,计算结果会覆盖当前实例的矩阵;
- mat4.scale(x, y, z):当前实例的矩阵乘以一个缩放为(x, y, z)的缩放矩阵,计算结果会覆盖当前实例的矩阵;
- mat4.set(m):将当前 Matrix4 实例替换成 m,m必须也是一个 Matrix4 变量;
- mat4.elements:当前实例的表示矩阵的类型化数组(Float32Array);
3、动画
动画感觉没什么可说的,基本原理就是每隔多少时间绘制一次,每次绘制的内容比上次多一点,最终把所有内容绘制出来,动画结束;
下面是之前整理过的一篇动画分析,有兴趣的可以去看一下;
TODO
坐标系中,z轴是垂直于屏幕的,x轴正方向为屏幕右侧,y轴正方向为屏幕上侧;
上面的例子中,旋转的时候,三角形有形变,这就有问题了,原因可能有两个:1.三角形所在的面发生变化;2.计算公式有错误;
三点确定一个面,变化过程中,z坐标一直是0,也就是说,三个点应该是被固定在了xy轴组成的平面上,从这儿往后推,感觉公式有问题,但书出来这么多年了,有问题早就发现了;唯一合理的解释是旋转中心不在xy轴组成的平面上,但是书中也没有提到;
这个问题先保留,看后边的章节里有没有解释;